
首先说一下机器人编程。通常来讲,机器人编程可分为示教在线编程和离线编程两种。示教编程一般用于入门级应用,如搬运、点焊等,对于复杂应用,示教编程在实际应用中主要存在以下问题:
1、示教在线编程过程繁琐、效率低。
2、精度完全是靠示教者的目测决定,而且对于复杂的路径示教在线编程难以取得令人满意的效果。
基于对示教编程出现的弊端,那么离线编程就出现啦!与示教编程相比,离线编程有如下优势:
1、减少机器人的停机时间,当对下一个任务进行编程时,机器人仍可在生产线上进行工作。
2、通过仿真功能,要预知发生的问题,从而将问题消灭在萌芽阶段。
3、适用范围广,可对各种机器人进行编程,并能方便的实现优化编程。
4、可对复杂任务进行编程。
5、便于修改机器人程序。
常用离线编程软件,可按不同标准分类,例如,可以按国内与国外分类,也可以按通用离线编程软件与厂家专用离线编程软件。
按国内与国外分类,可以为以下两大阵营:
l 国内:RobotArt
l 国外:RobotMaster、 RobotWorks、Robomove、RobotCAD、DELMIA、RobotStudio、RoboGuide
按通用离线编程与厂家专用离线编程,又可以为以下两大阵营:
l 通用:RobotArt、RobotMaster、Robomove、RobotCAD、DELMIA
l 厂家专用:RobotStudio、 RoboGuide、KUKA Sim
国内 RobotArt 独领风骚,领先国内同行4-5年时间,官网有免费下载,需要官网注册试用账号。
国外软件中,RobotMaster 相对来说最强的, 基于 MasterCAM 平台,生成数控加工轨迹是优势,RobotWorks, RoboMove 次之, 但一套都要几十万大洋,目前没试用。RobotCAD, DElMIA都侧重仿真,价格比前者还贵。
机器人厂家的离线编程软件,以ABB 的RobotStudio 是强,但也仅仅是把示教放到了电脑中,注重是仿真和节拍统计。
下面,对各离线编程软件,做详细对比。
1. RobotArt(中国,可免费下载试用)
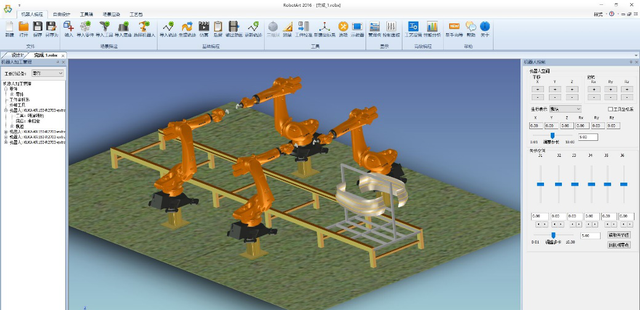
RobotArt来自帝都北京,有航空航天背景,是目前离线编程软件国内品牌中的顶尖的软件。软件最大特点是根据虚拟场景中的零件形状,自动生成加工轨迹,并且可以控制大部分主流机器人,对国内机器人支持是相当的棒棒哒!软件根据几何数模的拓扑信息生成机器人运动轨迹,之后轨迹仿真、路径优化、后置代码一气呵成,同时集碰撞检测、场景渲染、动画输出于一体,可快速生成效果逼真的模拟动画。广泛应用于打磨、去毛刺、焊接、激光切割、数控加工等领域。
下图为RobotArt离线编程仿真软件的界面:
优点:
1) 支持多种格式的三维CAD模型,可导入扩展名为step、igs、stl、x_t、prt(UG)、prt(ProE)、CATPart、sldpart等格式;
2) 支持多种品牌工业机器人离线编程操作,如ABB、KUKA、Fanuc、Yaskawa、Staubli、KEBA系列、新时达、广数等);
3) 拥有大量航空航天高端应用经验;
4) 自动识别与搜索CAD模型的点、线、面信息生成轨迹;
5) 轨迹与CAD模型特征关联,模型移动或变形,轨迹自动变化;
6) 一键优化轨迹与几何级别的碰撞检测;
7) 支持多种工艺包,如切割、焊接、喷涂、去毛刺、数控加工;
8) 支持将整个工作站仿真动画发布到网页、手机端;
缺点:
软件对外国小品牌机器人也不支持,不过作为机器人离线编程,还是相当给力的,功能一点也不输给国外软件。
重要的事说三遍,RobotArt软件可以在官网免费下载试用。
2. RobotMaster(加拿大,无试用)
RobotMaster来自加拿大,由上海傲卡自动化代理,与RobotArt类似,是目前离线编程软件国外品牌中的顶尖的软件。由于是在MasterCAM上做的二次开发,所以对机器人生成数控轨迹很擅长,但MasterCAM本身动辄十几万或几十万的价格,让人有些望尘莫及,更另说加上二次开发插件的RobotMaster了。
下图为RobotMaster软件界面:
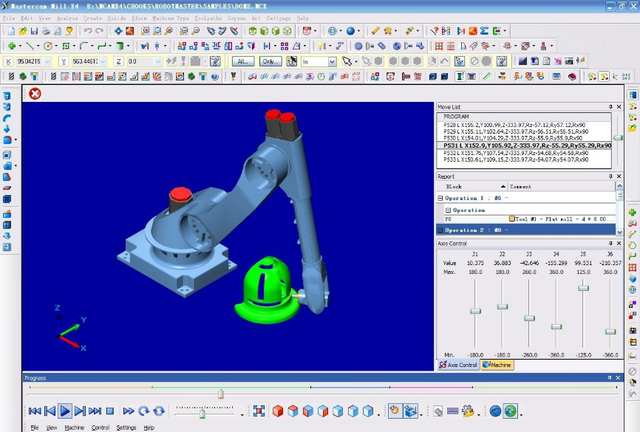
功能:RobotMaster在MasterCAM中无缝集成了机器人编程、仿真和代码生成功能,提高了机器人编程速度。
优点:可以按照产品数模,生成程序,适用于切割、铣削、焊接、喷涂等等。独家的优化功能,运动学规划和碰撞检测非常精确,支持外部轴(直线导轨系统、旋转系统),并支持复合外部轴组合系统。
缺点:暂时不支持多台机器人同时模拟仿真,基于MasterCAM做的二次开发,价格昂贵,企业版在20W左右。
RobotMaster软件的下载地址本人我没有找到,哪位小伙伴找到的话,记得告诉我一声哦
3. Robotworks(以色列,有试用,功能有限制)
Robotworks是来自以色列的机器人离线编程仿真软件,与RobotMaster类似,是基于Solidworks做的二次开发。使用时,需要先购买Solidworks。以爱因斯坦为代表的犹太人确实智商发达,整个团队只有6-7人,能做出这样软件实属不易,只可惜在中国的汉化、学习资料、服务等,只能让人惋惜了。由于是二次开发,交互性上,比RobotArt难用好多,可能是Solidworks向他开发放的接口不够多吧。主要功能如下:
(1) 全面的数据接口:Robotworks是基于Solidworks平台开发,Solidworks可以通过IGES,DXF,DWG,PrarSolid,Step,VDA,SAT等标准接口进行数据转换。
(2) 强大的编程能力:从输入CAD数据到输出机器人加工代码只需四步。
第一步:从Solidworks直接创建或直接导入其他三维CAD数据,选取定义好的机器人工具与要加工的工件组合成装配体。所有装配夹具和工具客户均可以用Solidworks自行创建调用;
第二步:Robotworks选取工具,然后直接选取曲面的边缘或者样条曲线进行加工产生数据点;
第三步:调用所需的机器人数据库,开始做碰撞检查和仿真,在每个数据点均可以自动修正,包含工具角度控制,引线设置,增加减少加工点,调整切割次序,在每个点增加工艺参数;
第四步:Robotworks自动产生各种机器人代码,包含笛卡尔坐标数据,关节坐标数据,工具与坐标系数据,加工工艺等,按照工艺要求保存不同的代码。
(3) 强大的工业机器人数据库:系统支持市场上主流的大多数的工业机器人,提供各大工业机器人各个型号的三维数模。
(4) 完美的仿真模拟:独特的机器人加工仿真系统可对机器人手臂,工具与工件之间的运动进行自动碰撞检查,轴超限检查,自动删除不合格路径并调整,还可以自动优化路径,减少空跑时间。
(5) 开放的工艺库定义:
系统提供了完全开放的加工工艺指令文件库,用户可以按照自己的实际需求自行定义添加设置自己独特工艺,添加的任何指令都能输出到机器人加工数据里面。
缺点:Robotworks基于Solidworks,Solidworks本身不带CAM功能,编程繁琐,机器人运动学规划策略智能化程度低。
优点:生成轨迹方式多样、支持多种机器人、支持外部轴。
4. ROBCAD (德国,无试用)
ROBCAD 是西门子旗下的软件,软件相当庞大,重点在生产线仿真,价格也是同软件中顶尖的,不是一般小伙伴能驾驭的了的。与RobotArt和RobotMaster比,个人感觉RobCAD的重点在生产线仿真,而不是机器人轨迹生成与控制。软件支持离线点焊、支持多台机器人仿真、支持非机器人运动机构仿真,精确的节拍仿真, ROBCAD 主要应用于产品生命周期中的概念设计和结构设计两个前期阶段,其主要特点包括:
(1) 与主流的 CAD 软件(如 NX、CATIA、IDEAS)无缝集成。
(2) 实现工具工装、机器人和操作者的三维可视化。
(3) 制造单元、测试以及编程的仿真。
ROBCAD 的主要功能包括:
(1) Workcell and Modeling:对白车身生产线进行设计、管理和信息控制。
(2) Spot and OLP:完成点焊工艺设计和离线编程。
(3) Human:实现人因工程分析。
(4) Application 中的 Paint、Arc、Laser 等模块:实现生产制造中喷涂,弧
焊,激光加工,绲边等等工艺的仿真验证及离线程序输出。
(5) ROBCAD 的 Paint 模块。喷漆的设计、优化和离线编程,其功能包括:
喷漆路线的自动生成、多种颜色喷漆厚度的仿真、喷漆过程的优化。
缺点:价格昂贵,离线功能较弱,Unix移植过来的界面,人机界面不友好。
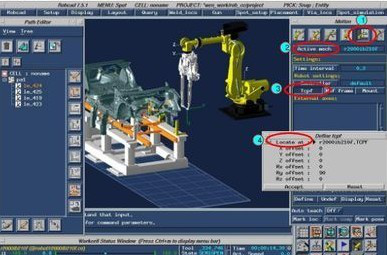
ROBCAD 软件界面
5. DELMIA(法国,无试用)
DELMIA是达索旗下的CAM软件,大名鼎鼎的CATIA是达索旗下的CAD软件。DELMIA有6大模块,其中Robotics解决方案涵盖汽车领域的发动机、总装和白车身(Body-in-White),航空领域的机身装配、维修维护,以及一般制造业的制造工艺。与RobotArt和RobotMaster比,个人认为DELMIA略显得不太专注,机器人模块只是他的1/6,可惜没有找到下载试用,有缘的话,很想看看机器人模块与RobotArt、RobotMaster相比,有何优劣。
DELMIA 的机器人模块 ROBOTICS 是一个可伸缩的解决方案,利用强大的 PPR集成中枢快速进行机器人工作单元建立、仿真与验证,是一个完整的、可伸缩的、柔性的解决方案。使用 DELMIA 机器人模块,用户能够容易地:
(1) 从可搜索的含有超过 400 种以上的机器人的资源目录中,下载机器人
和其它的工具资源。
(2) 利用工厂布置规划工程师所完成的工作。
(3) 加入工作单元中工艺所需的资源进一步细化布局。
缺点: DELMIA属于专家型软件,操作难度太高,不适宜新人学习,需要机器人专业研究生以上学生使用;工业正版单价也在百万级别。
6. RobotStudio (瑞士,无试用)
RobotStudio是瑞士ABB公司配套的软件,是机器人本体商中软件做的最好的一款。RobotStudio 支持机器人的整个生命周期,使用图形化编程、编辑和调试机器人系统来创建机器人的运行,并模拟优化现有的机器人程序。但他的特点在于仿真,根据几何模型动生成轨迹能力,与RobotArt和RobotMaster比,几乎是零,而且只支持ABB自家机器人。RobotStudio 包括如下功能:
(1) CAD 导入。可方便地导入各种主流 CAD 格式的数据,包括 IGES、STEP、VRML、VDAFS、ACIS 及 CATIA 等。机器人程序员可依据这些精确的数据编制精度更高的机器人程序,从而提高产品质量。
(2) AutoPath 功能。该功能通过使用待加工零件的 CAD 模型,仅在数分
钟之内便可自动生成跟踪加工曲线所需要的机器人位置(路径),而这项任务以往通常需要数小时甚至数天。
开发或维护机器人程序,可显著缩短编程时间、改进程序结构。
(4) 路径优化。如果程序包含接近奇异点的机器人动作,RobotStudio 可自
动检测出来并发出报警,从而防止机器人在实际运行中发生这种现象。仿真监视
器是一种用于 机器人运动优化的可视工具,红色线条显示可改进之处,以使机
器人按照最有效方式运行。可以对 TCP 速度、加速度、奇异点或轴线等进行优化,缩短周期时间。
(5) 可达性分析。通过 Autoreach 可自动进行可到达性分析,使用十分方
便,用户可通过该功能任意移动机器人或工件,直到所有位置均可到达,在数分钟之内便可完成工作单元平面布置验证和优化。
(6) 虚拟示教台。是实际示教台的图形显示,其核心技术是 VirtualRobot。
从本质上讲,所有可以在实际示教台上进行的工作都可以在虚拟示教台
(QuickTeach™)上完成,因而是一种非常出色的教学和培训工具。
(7) 事件表。一种用于验证程序的结构与逻辑的理想工具。程序执行期间,可通过该工具直接观察工作单元的 I/O 状态。可将 I/O 连接到仿真事件,实现工位内机器人及所有设备的仿真。该功能是一种十分理想的调试工具。
(8) 碰撞检测。碰撞检测功能可避免设备碰撞造成的严重损失。选定检测对象后,RobotStudio 可自动监测并显示程序执行时这些对象是否会发生碰撞。
(9) VBA 功能。可采用 VBA 改进和扩充 RobotStudio 功能,根据用户具体需要开发功能强大的外接插件、宏,或定制用户界面。
(10) 直接上传和下载。整个机器人程序无需任何转换便可直接下载到实际机器人系统,该功能得益于 ABB 独有的 VirtualRobot 技术。
缺点,就是只支持本公司品牌机器人,机器人间的兼容性很差。
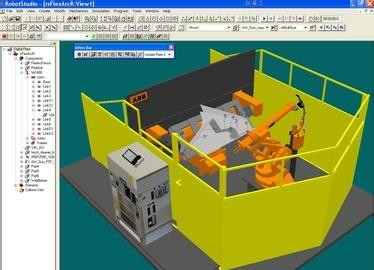
RobotStudio 软件界面
7. Robomove(意大利,无试用)
Robomove来自意大利,因其公司名叫QD,有时也直接称乎他为QD。同样支持市面上大多数品牌的机器人,机器人加工轨迹由外部CAM导入,与其他软件不同的是,Robomove走的是私人定制路线,根据实际项目进行定制。另一点不同的就是,Robomove与RobotArt和RobotMaster相比,本身是不带轨迹生成能力的,只支持轨迹导入功能,需要借助CATIA或UG等CAM软件生成轨迹,然后由Robomove来仿真,所以后置代码仿真是他的亮点。
缺点:需要操作者对机器人有较为深厚的理解,策略智能化程度与RobotMaster有较大差距。
以上评测可能略带主观性,各位朋友也可以自己去对比验证,但本人在做这番比较过程中,只有RobotArt能够下载试用,国内还有免费培训和技术支持服务,RobotWorks可以下载,但还需要安装Solidworks,对各自版本号匹配还有要求,关键是功能有限制,无法充分评估,其他软件,都是找的*解版,不敢保证功能与正式版是否完全一致。
本网页内容旨在传播知识,若有侵权等问题请及时与本网联系,我们将在第一时间删除处理。E-MAIL:dandanxi6@qq.com
